成瀬ダムのDXとして、8月10日(木)に原石山採取工事の自動運転制御についてと8月18日(金)には、堤体打設工事の自動運転制御について、取材に行ってきました!
チームCSG久々の現場!わくわく・ドキドキしながら行ってきましたよ~それでは行ってみましょ~!!
 |
成瀬ダム 原石山採取工事自動運転制御室です! 以前見学させていただいたときより、スッキリ!しかも広くなっていました(*^_^*) 中はこんな感じ |
 |
ここにいるオペレーターは、窓からダンプの状況を確認しつつ、モニターに映し出されている「自動運転制御画面」でシナリオを確認・選択・決定しています。 オペレーターは2人体制です。 交差点は事故が起こりやすいので、窓から目視、モニターで確認と注意してみているそうです。 |
 |
初めに、原石山JVの機電主任さんから建設機械の自動化についての説明を聞きました! |
 |
GPS(今はGNSSと言います)や、障害物検知のセンサーや方位計などを搭載しています。 |
 |
 |
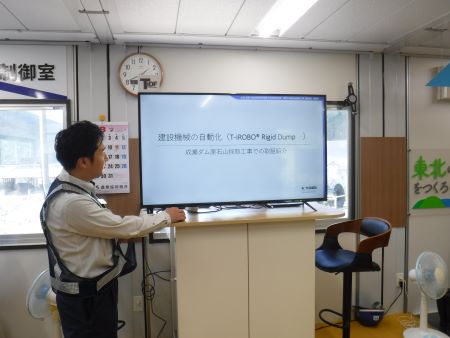
自動運転の前に重機に乗車しているオペレーターが走行をして、コンピュータに経路と速度の記憶をします。そこに一時停止や、ダンプアップする位置などの動作を組み込み、自動で動くようにシナリオを作成しています。
 |
バックホウにもGPSが搭載されています。 バックホウからの”ここだよ”という位置情報を受け取り、積込み位置へ向かって、自動で後退します。 バックホウのタブレットの画面は ←こんな感じ |
 |
設定した範囲内に障害物を検知すると自動走行を停止する機能があります。 これによって『何か急に飛び出てきても止まる』、『落下物のようなものが有っても止まる』ような安全装置もあります。 |
 |
ダンプについている安全装置※です。 これは前方と後方についていて障害物を検知してくれます。 ※LiDAR(Light Detecction And Ranging):レーザー光を照射して、その反射光の情報をもとに対象物までの距離や対象物の形などを計測する装置 |
 |
また、何かしらのトラブルが発生してダンプを停止させる必要がある場合に押す遠隔非常停止ボタンが制御室にあります。 ←制御室の非常停止ボタンはこれ!(皆さん奥のコントローラー気になると思いますが、コチラは後程(´∀`*)ウフフ |
 |
現在、現場で稼働している範囲は骨材ストックヤード~プラント投入ホッパーまでです。 |
今回は特別に!チームCSGも乗車体験をしてきました!!
あるく 第44回でも、乗車しておりますが、、、
今回取材に行ったチームCSGメンバーのほとんどが初めて!!
自動運転は、運転が上手なのでしょうか?
 |
 |
 |
ハシゴをよじ登っていよいよ乗車!! 特別見学会等でたくさん見ていますが、実際乗り込んでみると迫力が!! 正面横に3つのランプが付いていて、それぞれ下記の意味があるそうです! 赤→異常発生 黄→自動運転中 青→手動運転中 |
 |
 |
実際の目線 制御室から
 |
 |
重ダンプ助手席から 制御室から
1日に20~25往復くらいするそうです。ホッパーでの投入の順番待ちに時間がかかるそう…投入作業まで行って16時30分までに終了しなくてはいけないので、ホッパーでの順番待ち時間も考慮して作業されていました!
 |
 |
 |
積込みが終わったらプラント投入ホッパーまで移動! 投入する順番が来るのを待ちます。材料の大きさによって待機する時間が違うそうです。 この日は3分~5分待ちました。 上流展望台からも見れるのでぜひ観察してみてください♪ |
有人ダンプ(原石山から運んでいる)はホッパーでの待ち時間が5分を過ぎると投入せずに仮置き場においてもいいルールになっているそうです。
自動ダンプは仮置き場がないので投入するまでは戻れません!
投入したら、積込みの場所に戻るという流れです。

↑画像をクリックすると動画が再生されます。
プラント投入ホッパーまでの動画の撮影もしましたよ~
実際に乗車している感覚になると思います!
揺れが多いので、画面酔いされる方はお気を付けください<(_ _)>
 |
制御室には車内の様子が分かるモニターもあります。 せっかくなので運転席にいる作業員さんに質問してみました! |
Q 自動化重ダンプに乗っていて「危ない!」と思ったことは?
A, 雨の日の勾配です。それも降り始めと止んだあとです。
走行前に滑りそうか確認しますが、作業中に降り出し、「危ない!」と思ったら制御室に
連絡し水を撒いてもらいます。
さて、ここからは少しマジメな話。
今回、堤体打設工事、原石山採取工事を対象に、全国的にも先進の取り組みをしている現場の取材となっております。
せっかくの機会なので、少しだけインタビュー形式で両JVさんに伺った内容を紹介したいと思います。
今回は原石山JV編となります。
質問した内容↓
◇自動化に取り組む背景
◇なぜ成瀬ダムで自動化に取り組むことになったか
◇自動化によりこれまでに分かった効果は?
◇これまで実施してきた中での課題は?
◇自動運転を行う上での安全対策は?
◇自動運転の今後の展開は?
◇自動化に取り組む背景
高齢化が社会的な問題となる中、生産性向上や人手不足の解消は、建設産業においても大きな課題です。
近年、国土交通省が推進しているi-Constructionにおいて、様々なICTの活用により、建設現場での生産性は徐々に向上してきているが、今後深刻化が予想される人手不足に対応するためには、更なる生産性向上への取り組みを加速する必要性があります。
中でも建設機械の自動化技術は、建設現場で早期に確立が望まれる技術の一つそのため、映像や計測などの各種データの利活用により、建設現場をスマート化する建設DX(デジタルトランスフォーメーション)を推進し、生産性向上、安全性の向上が期待できるため、様々な技術開発が期待されています。
このような背景から、2013年より無人で作業を行う建設機械「T-iROBO」※の開発に取り組んでいます。
※ T-iROBO:人とロボットの協働を目的として、大成建設が開発した各種作業用ロボット
◇なぜ成瀬ダムで自動化に取り組むことになったか
令和2年に大成建設はリジットダンプ自動運転技術を開発し、三重試験場等にて改良を重ねた実機を全国で現場運用に挑戦する段階であり、南摩ダム(栃木県)で先行的に運用を行っています。
成瀬ダムでは、各受注者が様々な新技術を駆使してダム建設に取り組む中、発注者(当時の主任監督員)や本支店のバックアップもあり、社内で成瀬ダム原石山工事が抜擢されました。
令和4年に当現場でCSG母材をストックヤードから製造プラントに投入する運搬作業に適用し、令和5年現在の本運用に至っています。
◇これまでに分かった効果は?
現状の効果としては、操作オペレータは操作室で操作しており、そのため、1日中ダンプの中で仕事をする過酷な疲労は軽減されており、オペレータへの負担軽減につながる効果があると思われます。
◇これまで実施してきた中での課題は?
現場は日々状況に合わせて形を変えます。そのため、自動化走行をするためのルートも都度形を変えます。現状の制御システムでは、有人で走行したルートを軌跡として再現できるためルート変更は容易にすることが可能なシステムになっています。現場にて実施してきた中で、有人では走行できるが自動走行では軌跡として再現できない経路の形があることが分かってきています。今後の課題として、様々な走行経路の形から自動化走行では苦手になる形の抽出をしていきたいです。
◇自動運転を行う上での安全対策は?
以下、3点の安全対策がある
①接触防止システムとしてLiDARセンサーが車両の前後に設置されており、走路上の障害者や他重機を検知すると停止します。
②遠隔非常ボタンを設けており、システムが暴走した(制御が効かない)場合にボタンを押すことで、強制的に運転を停止させる機能をもたせています。
③無線接続が切れた際に、自動運転は停止する仕組みになっています。
◇自動運転の今後の展開は?
有人ダンプと無人ダンプ及びその他の有人と無人が混在する状況においても、安全かつ効率的に運用できるシステムを構築するよう取り組みたい。またデジタルツインとなるT-iDigital
Fieldと連携を図り効率的な建設機械の運用を可能とし、建設機械から排出されるCO2の削減についても取り組んでいきたい。
個人的になるほど!![]() と思ったのは、原石山JVさんの運転の制御です。
と思ったのは、原石山JVさんの運転の制御です。
近年小学生でもプログラミングの授業が始まっていますが、小学生でも理解できる分かりやすいフローになっていた事です。
誰でも簡単に使えるように。という事でした。
ごく一部の”わかる人間”しか使えないものでは普及はしませんものね。 By親方
 |
 |
上流展望台のプレハブの1階では、原石山JVさんの自動運転重ダンプの制御画面などが大型モニターで表示されています。気になる方はぜひお越しください!
原石山採取工事編はここまで!
次回は堤体打設工事編です。お楽しみに~♪
 |
先ほどのコントローラー覚えていますか?? あのコントローラー実は、、、 自動運転のダンプを動かせるんです!!! ←やりたい!と手を挙げたT係長が実際にダンプアップの体験をしていました! (画像をクリックするとダンプアップしている動画が再生されます。) |
第51回 春のドライブコース~342号沿線とダム周辺~ 第53回 成瀬ダムの自動化について学ぼう!~堤体打設工事編~
第53回 成瀬ダムの自動化について学ぼう!~堤体打設工事編~